Sections

Left Column
Right Column
Text Area
Adaptive Monocular Depth Processor: Fusing Vision Transformer with Time-of-Flight
Text Area
Product introduction
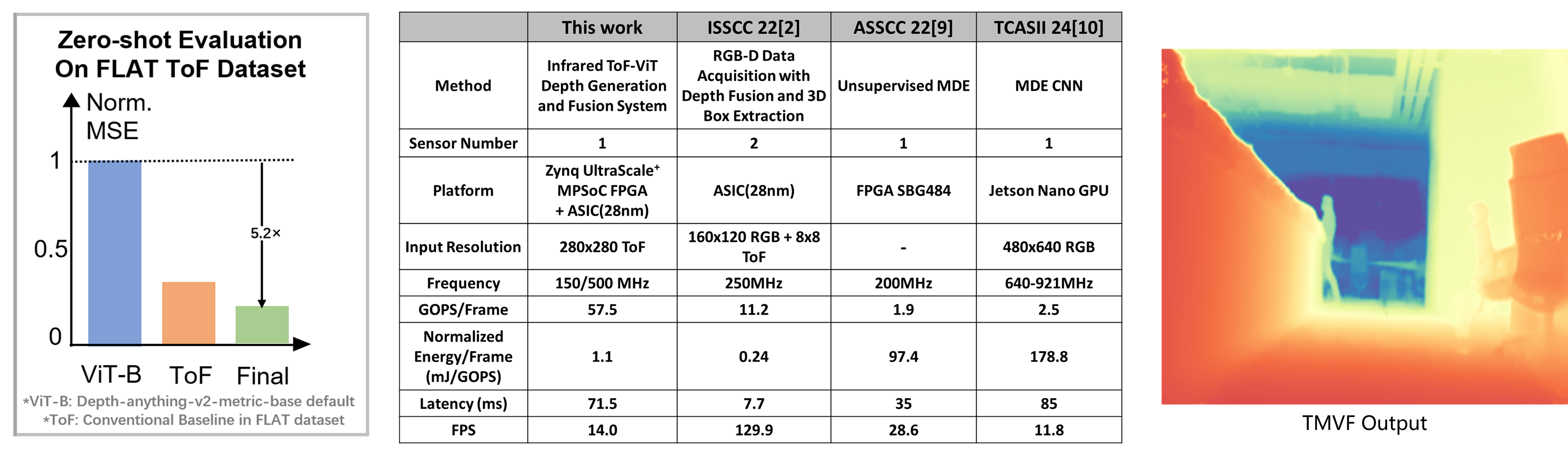
While Time-of-Flight (ToF) and Monocular Depth Estimation (MDE) advance rapidly, both face inherent sensor limitations. Our system adaptively fuses ToF’s precision with a state-of-the-art monocular transformer’s depth priors, eliminating multi-sensor calibration via single infrared input.
- Foundation-Model Enhancement:
Integrates a state-of-the-art monocular transformer model trained on large-scale datasets for generalizable depth prediction. - Single-Sensor Simplicity:
Operates entirely on infrared input, minimizing hardware complexity and alignment errors. - High Adaptability and Efficiency:
Designed to benefit from advances in both MDE models and ToF hardware, enabling scalable deployment in embedded systems.
Text Area
Technology Specifications
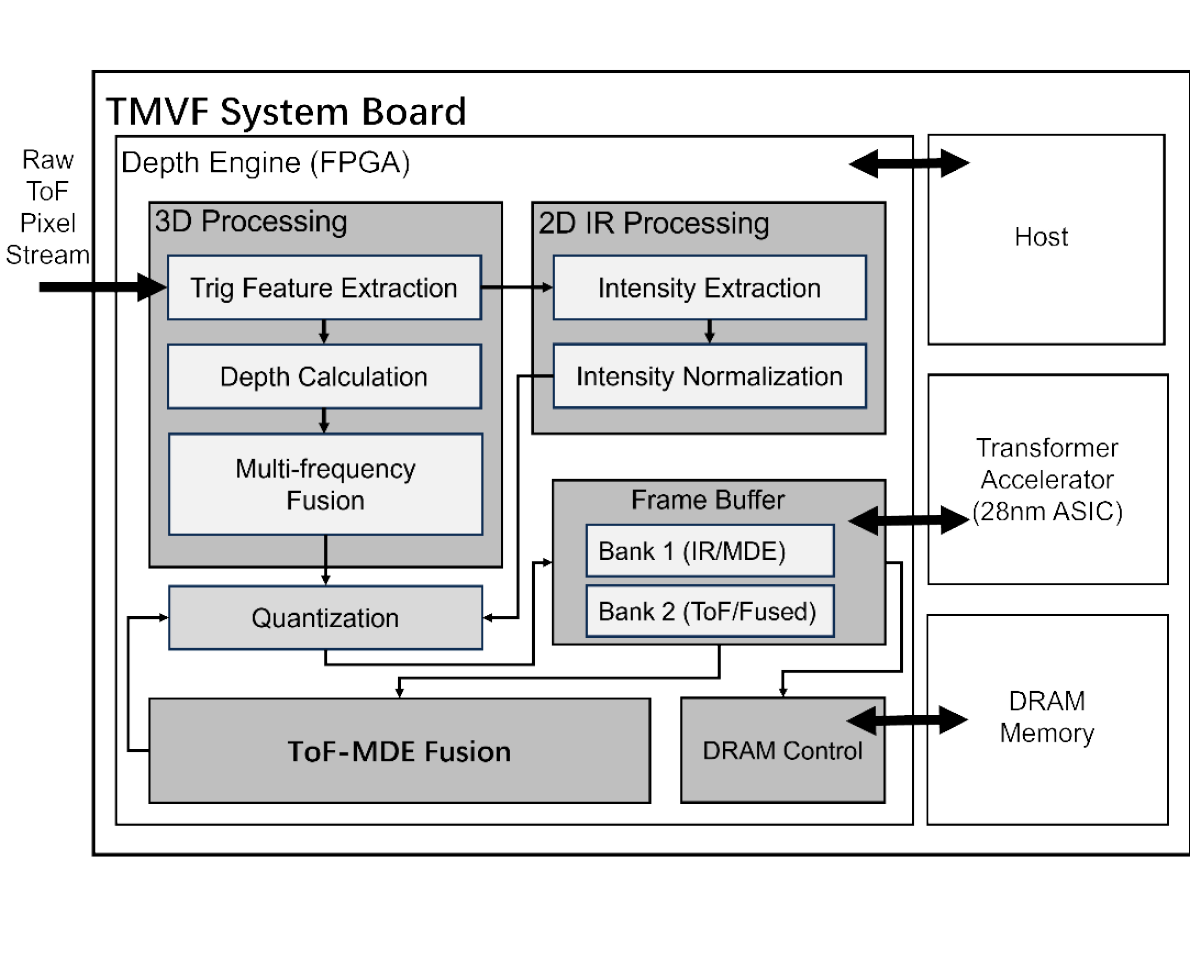
- System Architecture:
- Core Modules: Depth fusion unit, 8-bit CNN-Transformer core, Arm host processor
- Dual Processing Paths:
- ToF Depth: Physical depth from phase information
- ViT Depth: Monocular depth prediction via transformer on intensity map
- Adaptive Fusion Engine:
- Local Compensation: Fills missing ToF values using ViT residuals
- Delta Fusion: First-order fusion with exponential decay weights
- Robustness Control: Overflow prevention & confidence tuning by ToF hole density
- Non-Uniformity Detection: Sobel/Laplacian gradient analysis on ViT-ToF differences
- Range-Consistent Smoothing: Structural refinement for noise/reflection mitigation
Text Area
If you are interested in our technologies, please contact us.